
나영진 기계시스템학부 교수, 종이접기 응용한 소프트 모듈러 로봇 개발
- 조회수 1955
- 작성자 커뮤니케이션팀
- 보도일자 2022-07-07
우리대학 기계시스템학부 나영진 교수 연구팀이 주어진 환경에 따라 변신할 수 있는 종이접기 기반 소프트 모듈러 로봇을 개발했다.
이번 연구는 공압으로 ‘접힘’과 ‘펴짐’ 두 가지 구동 원리를 구현할 수 있는 개별 모듈을 제안하고 모듈을 레고처럼 조립하여 다양한 형상 변화가 가능한 로봇을 제작할 수 있는 새로운 방법이다. 모듈을 독립적으로 제어할 수 있기 때문에 코끼리가 코를 자유롭게 움직이며 동작을 수행하는 것과 같은 복잡한 기능을 구현할 수 있다.
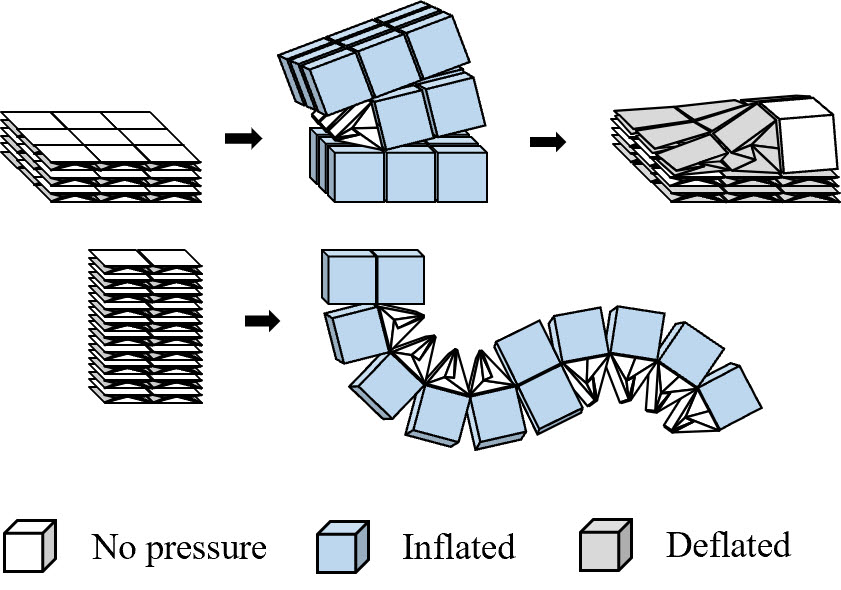
종이접기 기반 모듈 로봇 그림. 멀티블록으로 구성된 로봇은 개별적으로 모듈을 제어하여
평면 모드에서 임의 구조(위)와 S 모양 구조(아래)를 변경할 수 있음
개발한 모듈은 딱지처럼 얇게 접히기도 하고 주사위 블록처럼 펼쳐질 수 있다. 연구팀이 제안하는 방식은 모듈들을 자유롭게 조립 및 분해할 수 있고 모듈 개수에 관계없이 개별적으로 공압을 통해 제어할 수 있다. 기존에 소프트 로봇 분야에서 공압을 많이 사용해왔으나 모듈러 로봇은 모듈 개수가 증가할수록 공압 라인 개수 역시 증가하게 되어 시스템이 복잡해진다는 문제점이 있다. 본 연구팀이 제시하는 새로운 개별 제어 방법은 이 문제점을 극복할 수 있는 새로운 기술이다.
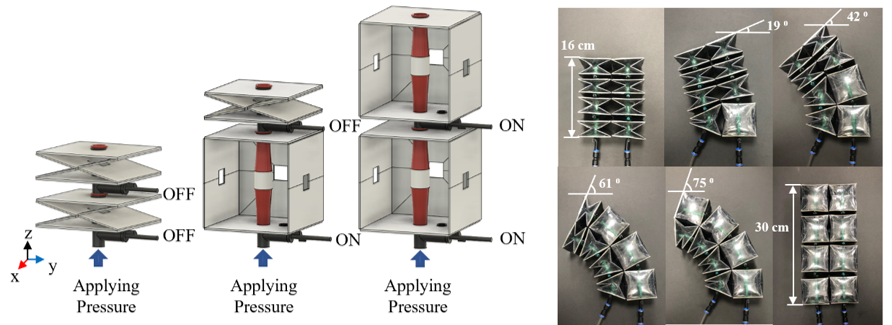
개별 모듈 제어가 가능한 모듈 매커니즘(좌). 멀티블록 구조에서 개별모듈 ‘펼침’ 및 ‘접힘’ 기능을 구현한 모습
이번 연구는 박윤하 석사과정생(기계시스템학과21), 강주현 학생(기계시스템학부 19), 나영진 교수가 참여했으며 연구 성과는 로봇 분야 국제 학술지 IEEE Robotics and Automation Letters (IF: 4.321)에 게재될 예정이다.
(논문명: Reconfigurable Shape Morphing with Origami-Inspired Pneumatic Blocks)

(사진 왼쪽부터) 박윤하 석사과정 학생(기계시스템학과), 강주현 학사과정 학생(기계시스템학부), 나영진 교수(기계시스템학부)