
Professor Young-jin Na develops a soft modular robot using origami
- Views 1561
- Writer 커뮤니케이션팀
- 보도일자 2022-08-29
A research team led by Professor Young-jin Na of the Department of Mechanical Systems Engineering at Sookmyung
Women’s University has developed an origami-based soft modular robot that can transform according to a given environment.
This study proposes an individual module that can implement the two driving principles of “folding” and “unfolding” with pneumatics, and is a new method to build a robot capable of various shape changes by assembling the modules like Lego pieces. Because the modules can be controlled independently, complex functions such as elephants freely moving their noses and performing motions can be implemented.
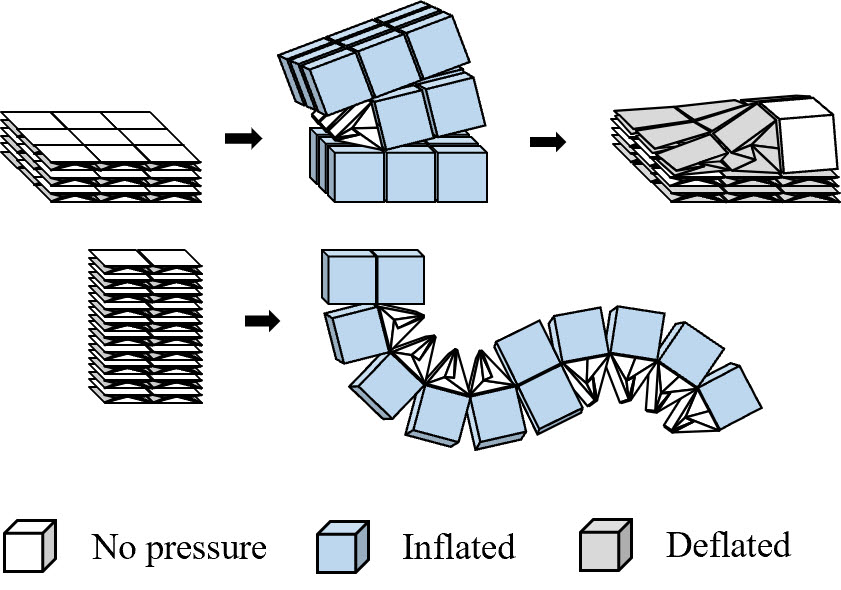
structure (top) and S-shaped structure (bottom) in planar mode
The developed module can be folded like paper and unfolded like a dice block. In the method proposed by the research
team, modules can be freely assembled and disassembled and individually controlled through pneumatics regardless of
the number of modules. In the past, pneumatic pressure has been used a lot in the field of soft robots, but as the number of modules increases, the number of pneumatic lines increases, thereby complicating the system. The new individual control method presented by this research team is a new technology that can overcome this problem.
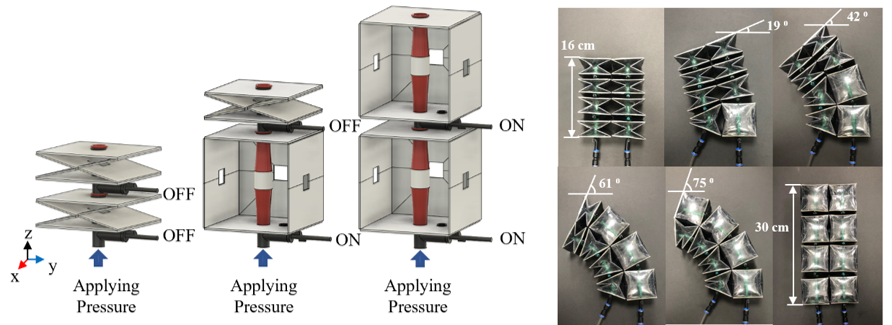
Module mechanism that allows individual module control (left). Implementation of individual module’s “unfolding” and “folding” functions in a multi-block structure
This research was participated by Graduate Student Yoon-ha Park (Department of Mechanical Systems Engineering, ‘21), Student Joo-hyun Kang (Department of Mechanical Systems Engineering, ‘19), and Professor Young-jin Na, and the research results are to be published in IEEE Robotics and Automation Letters (IF: 4.321).
(Title of Paper: Reconfigurable Shape Morphing with Origami-Inspired Pneumatic Blocks)

(From the left of the photo) Graduate Student Yoon-ha Park (Department of Mechanical Systems Engineering), Undergraduate Student Joo-hyun Kang (Department of Mechanical Systems Engineering), Professor Young-jin Na (Department of Mechanical Systems Engineering)